publications
publications by categories in reversed chronological order. generated by jekyll-scholar.
2024
- UAV Design
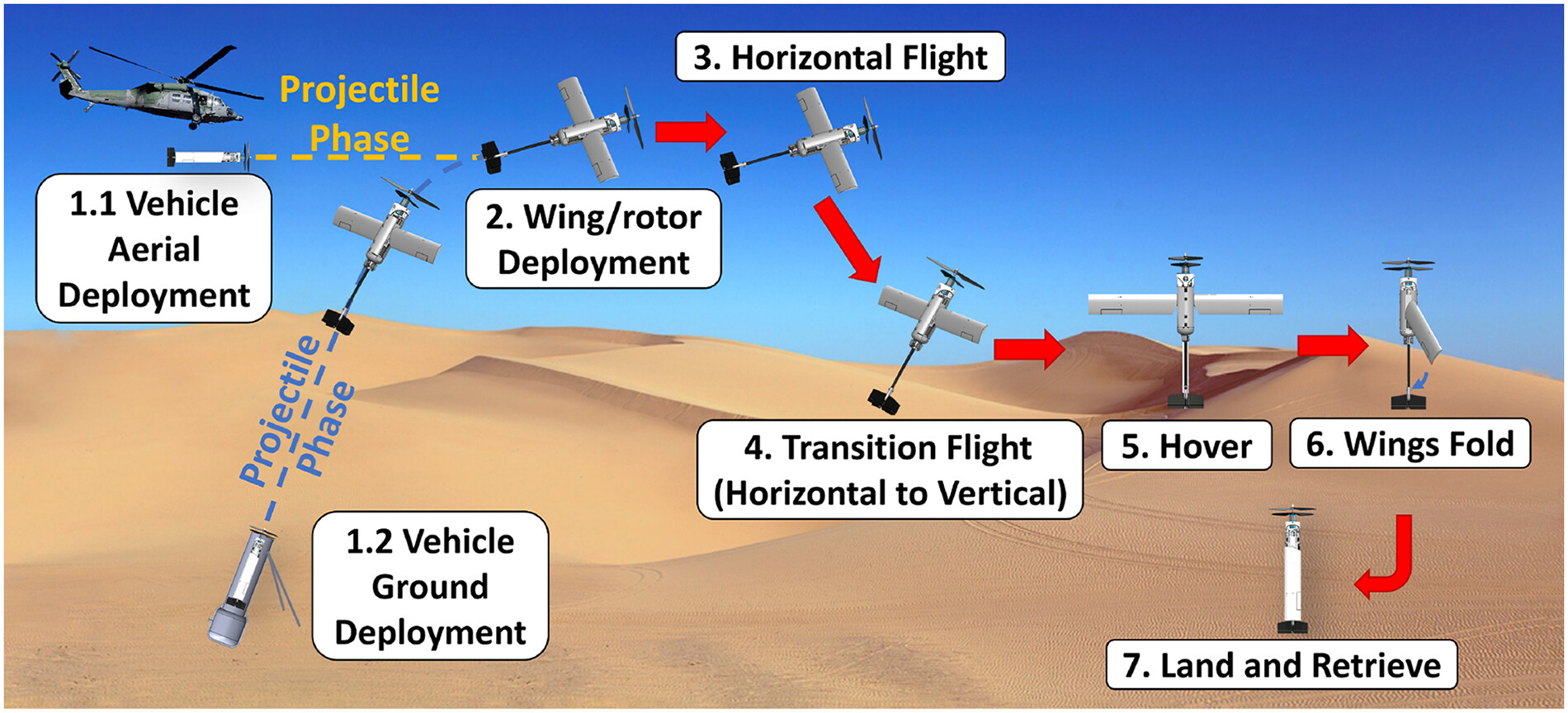 Development of a tube-launched tail-sitter unmanned aerial vehicleJiaze Cai, Hunter Denton, Moble Benedict, and 1 more authorInternational Journal of Micro Air Vehicles, 2024
Development of a tube-launched tail-sitter unmanned aerial vehicleJiaze Cai, Hunter Denton, Moble Benedict, and 1 more authorInternational Journal of Micro Air Vehicles, 2024This paper describes the development and flight testing of a tail-sitter unmanned aerial vehicle (UAV) platform that has the potential to be tube-launched. Integrated with vertical take-off and landing (VTOL) capability, the platform can perform high-endurance loiter tasks along with low-speed and hovering flights, and land vertically in limited spaces. The current design utilizes a thrust-vectored counter-rotating coaxial propeller combined with a foldable conventional fixed-wing to accomplish both vertical and horizontal flights. A feedback control strategy capable of stabilizing and controlling the vehicle in both vertical and horizontal flight was designed and implemented on a custom-designed 1.7-gram autopilot. Several tests were conducted in hover and edgewise flight with aggressive pilot inputs to demonstrate the controllability of the aircraft even in the presence of moderate wind gusts. Additionally, transition flight tests were also performed, which demonstrated the vehicle’s capability of transitioning from vertical to fixed-wing horizontal flight using thrust-vectoring-based pitch control.
@article{cai2024ALUAS, author = {Cai, Jiaze and Denton, Hunter and Benedict, Moble and Kang, Hao}, title = {Development of a tube-launched tail-sitter unmanned aerial vehicle}, journal = {International Journal of Micro Air Vehicles}, publisher = {sagepub}, volume = {16}, number = {}, pages = {17568293241254045}, year = {2024}, doi = {10.1177/17568293241254045}, } - Control, RL
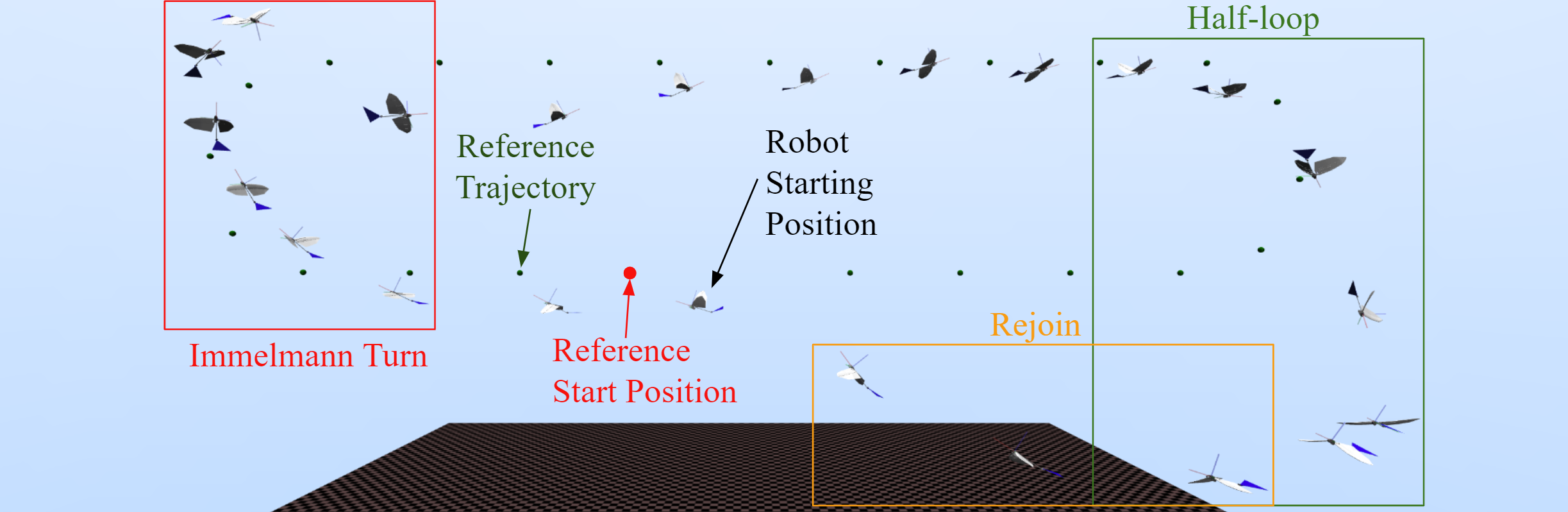 Learning-based Trajectory Tracking for Bird-inspired Flapping-Wing RobotsJiaze Cai, Vishnu Sangli, Mintae Kim, and 1 more author2024
Learning-based Trajectory Tracking for Bird-inspired Flapping-Wing RobotsJiaze Cai, Vishnu Sangli, Mintae Kim, and 1 more author2024Bird-sized flapping-wing robots offer significant potential for agile flight in complex environments, but achieving agile and robust trajectory tracking remains a challenge due to the complex aerodynamics and highly nonlinear dynamics inherent in flapping-wing flight. In this work, a learning-based control approach is introduced to unlock the versatility and adaptiveness of flapping-wing flight. We propose a model-free reinforcement learning (RL)-based framework for a high degree-of-freedom (DoF) bird-inspired flapping-wing robot that allows for multimodal flight and agile trajectory tracking. Stability analysis was performed on the closed-loop system comprising of the flapping-wing system and the RL policy. Additionally, simulation results demonstrate that the RL-based controller can successfully learn complex wing trajectory patterns, achieve stable flight, switch between flight modes spontaneously, and track different trajectories under various aerodynamic conditions.
@article{cai2024learning, title = {Learning-based Trajectory Tracking for Bird-inspired Flapping-Wing Robots}, author = {Cai, Jiaze and Sangli, Vishnu and Kim, Mintae and Sreenath, Koushil}, year = {2024}, eprint = {2411.15130}, archiveprefix = {arXiv}, primaryclass = {cs.RO}, }


2022
- Design
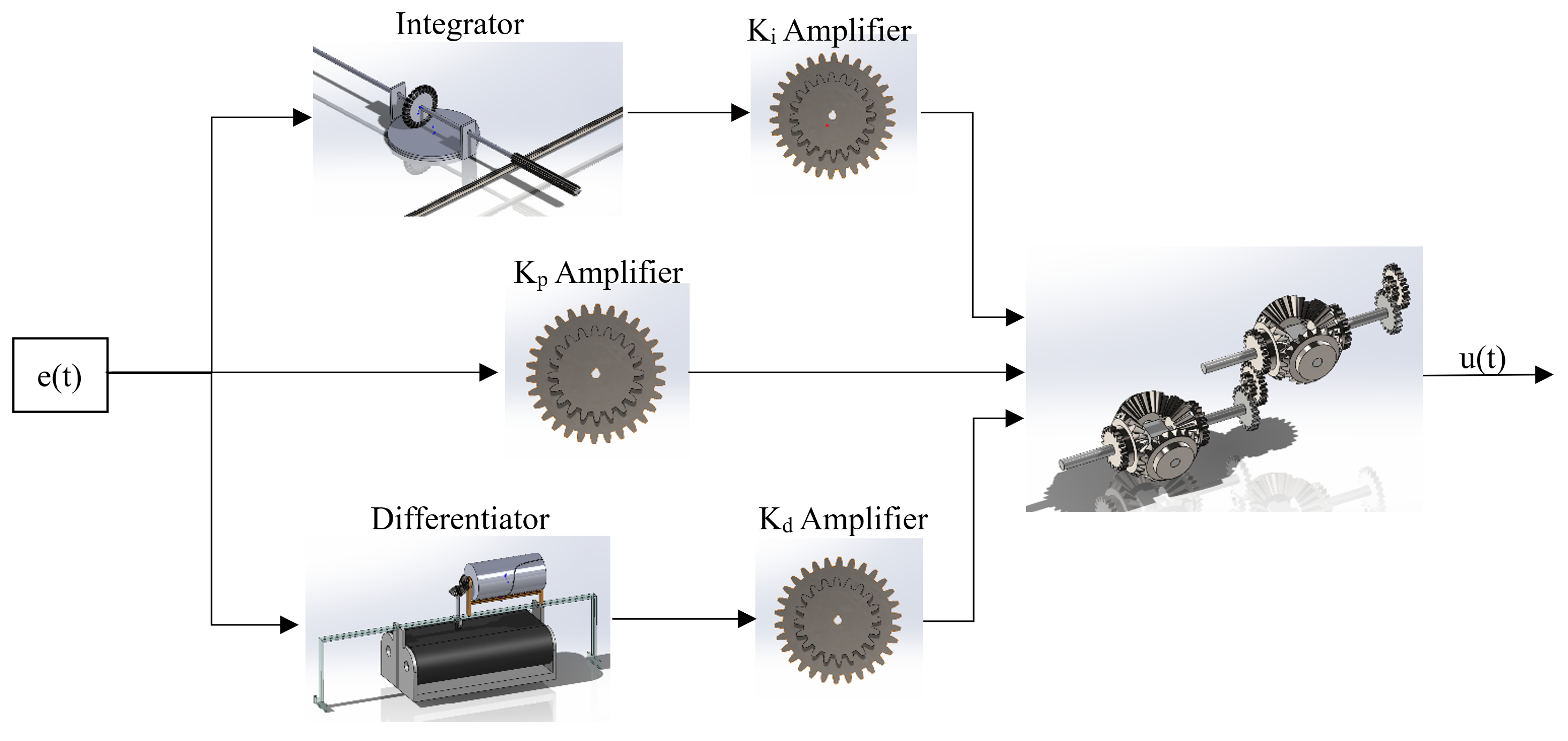 A Fully Mechanical Realization of PID ControllerJiaze CaiHighlights in Science, Engineering and Technology, Sep 2022
A Fully Mechanical Realization of PID ControllerJiaze CaiHighlights in Science, Engineering and Technology, Sep 2022PID controller is one of the most widely used control elements in the industry. Over history, people have implemented the PID controller mechanically with pneumatical components, electronically in circuits, or digitally using DSP. However, the pure mechanical realization of PID controllers is rarely studied. This paper presents an analog PID controller based on mechanical computation components, including a mechanical integrator, a mechanical differentiator, mechanical constant multipliers, and a mechanical adder. In this work, those parts are studied respectively with CAE modeling and mathematical derivation. A novel design of mechanical differentiator is also introduced to conduct the calculation of the differential part on the PID controller. This work explores the theoretical possibility of a new form of PID controller realization, that is, applying the method of mechanical analog computation to the implementation of a PID controller.
@article{cai2022PID, title = {A Fully Mechanical Realization of PID Controller}, author = {Cai, Jiaze}, journal = {Highlights in Science, Engineering and Technology}, volume = {9}, pages = {319--328}, year = {2022}, month = sep, url = {https://drpress.org/ojs/index.php/HSET/article/view/1861}, doi = {10.54097/hset.v9i.1861}, }
